Extended Kalman filter example in R
Kalman filter
I had the following dynamic linear model for the Kalman filter last week:
\[ \begin{aligned} x_{t+1} & = A x_t + w_t,\quad w_t \sim N(0,Q)\\ y_t &=G x_t + \nu_t, \quad \nu_t \sim N(0,R)\\ x_1 & \sim N(\hat{x}_0, \Sigma_0) \end{aligned} \]
With \(x_t\) describing the state space evolution, \(y_t\) the observations, \(A, Q, G, R, \Sigma_0\) matrices of appropriate dimensions, \(w_t\) the evolution error and \(\nu_t\) the observation error. The Kalman filter provides recursive estimators for \(x_t\) via:
\[ \begin{aligned} K_{t} &= A \Sigma_t G' (G \Sigma_t G' + R)^{-1}\\ \hat{x}_{t+1} &= A \hat{x_t} + K_{t} (y_t - G \hat{x}_t) \\ \Sigma_{t+1} &= A \Sigma_t A' - K_{t} G \Sigma_t A' + Q \end{aligned} \]
In the case of nonlinearities on the right hand side of either the state (\(x_t\)) or observation (\(y_t\)) equation the extended Kalman filter uses a simple and elegant trick: Taylor series of the first order, or in other words, I simply linearise the right hand side. The matrices \(A\) and \(G\) will be the Jacobian matrices of the respected vector functions.Logistic growth
As an example I will use a logistic growth model, inspired by the Hakell example given by Dominic Steinitz.
The logistic growth model can be written as a time-invariant dynamical system with growth rate \(r\) and carrying capacity \(k\): \[ \begin{aligned} \dot{p} & = r p\Big(1 - \frac{p}{k}\Big) \end{aligned} \] The above ordinary differential equation has the well known analytical solution:
\[ p = \frac{kp_0\exp(r\,t)}{k + p_0(\exp(r\,t) - 1)} \]
Suppose I observe data of a population for which I know the carrying capacity \(k\), but where the growth rate \(r\) is noisy.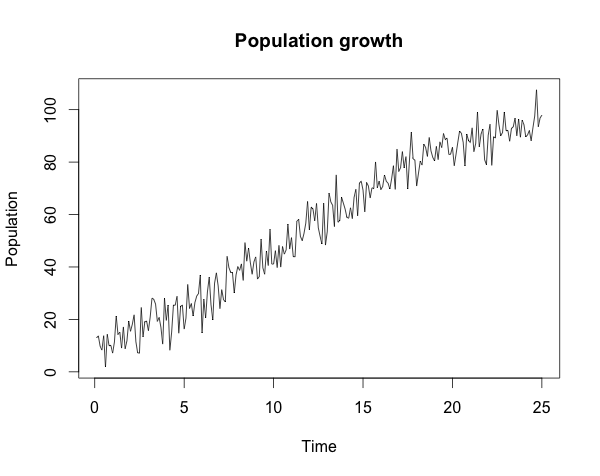
Extended Kalman filter
The state space and observation model can then be written as: \[ \begin{aligned} r_i &= r_{i-1} \\ p_i &= \frac{kp_{i-1}\exp(r_{i-1}\Delta T)}{k + p_{i-1}(\exp(r_{i-1}\Delta T) - 1)} \\ y_i &= \begin{bmatrix}0 & 1\end{bmatrix} \begin{bmatrix}r_i \\ p_i\end{bmatrix} + \nu \end{aligned} \]
Or with \(x_i:=\begin{bmatrix}r_i & p_i\end{bmatrix}'\) as:
\[ \begin{aligned} x_i &= a(x_i)\\ y_i &= G x_i + \nu_i\\ \nu_i & \sim N(0,R) \end{aligned} \]
In my example the state space model is purely deterministic, so there isn’t any evolution noise and hence \(Q=0\).
With an initial prior guess for \(x_0\) and \(\Sigma_0\) and I am ready to go. The R code below shows my implementation with the algorithm above. Note that I use thejacobian function of the numDeriv package.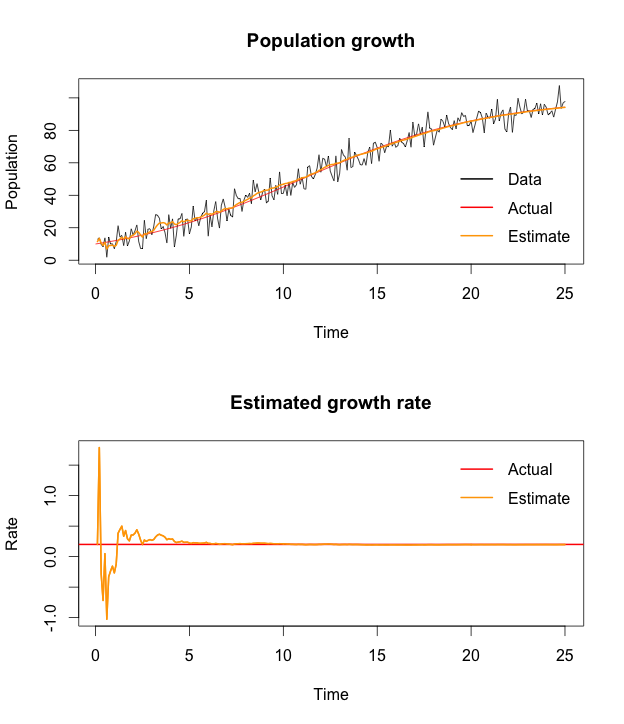
R code
Session Info
R version 3.1.2 (2014-10-31)
Platform: x86_64-apple-darwin13.4.0 (64-bit)
locale:
[1] en_GB.UTF-8/en_GB.UTF-8/en_GB.UTF-8/C/en_GB.UTF-8/en_GB.UTF-8
attached base packages:
[1] stats graphics grDevices utils datasets methods base
other attached packages:
[1] numDeriv_2012.9-1
loaded via a namespace (and not attached):
[1] tools_3.1.2Citation
For attribution, please cite this work as:Markus Gesmann (Jan 13, 2015) Extended Kalman filter example in R. Retrieved from https://magesblog.com/post/2015-01-13-extended-kalman-filter-example-in-r/
@misc{ 2015-extended-kalman-filter-example-in-r,
author = { Markus Gesmann },
title = { Extended Kalman filter example in R },
url = { https://magesblog.com/post/2015-01-13-extended-kalman-filter-example-in-r/ },
year = { 2015 }
updated = { Jan 13, 2015 }
}